< juggling 만들기 >
1. 공이 포물선을 그린다.
2. 공이 손에 쥐어줬다가 다시 빠져나간다.
1) 공이 포물선을 그린다.
비스듬히 던져 올린 물체는 수평 방향으로는 공기의 저항을 무시 할 때 아무런 힘이 작용하지 않으므로 수평방향으로는 등속 운동을 하게 되고 수직방향으로는 중력만이 작용하므로 지구중심방향으로 등가속도 운동을 하게 되는 운동을 포물선 운동이라고 합니다. x 축은 등속운동을 하므로 시간이 지남에 따라 일정한 거리만큼 x축의 이동거리를 증가시켜 주면 될 것이고, y축은 중력가속도가 작용하므로 이동거리가 점차 작아지다가 최고 꼭짓점을 지나면 이동거리가 다시 증가합니다.
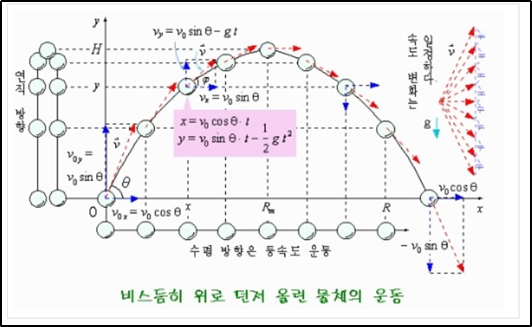
위에 공식을 역으로 이용하여 거리가 정해져 있다고 가정하에 포물선 방정식에서 속도를 반대로 구하면 시간당 움직이는 X, Y 거리를 알 수 있고 포물선의 궤적 계산이 가능합니다.
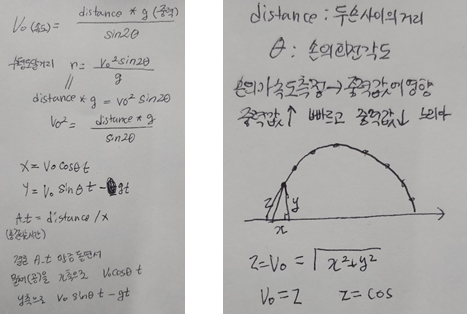
밑에는 각도 : 70 / 중력 : 9.8 / 거리 : 두 개의 붉은 상자 조건하에 실험
이를 leap motion 적용시켜서
거리 : 두 손 사이의 거리
각도 : 손의 축의 회전 정도
중력 : 손의 가속도를 통해 조정 (가속도 높을수록 공의 움직임이 빠르게 낮을수록 공의 움직임이 느리게 조정 )
으로 개발을 진행했습니다.
2) 공이 손에 쥐어줬다가 다시 빠져나간다. : 손에 붙이기(Attach)
이 경우는 공과 손 사이의 거리 계산을 통해 일정 이하의 거리 값을 가질 경우 공의 위치를 손바닥 위의 위치로 이동시켜주었습니다. 애먹었던 부분은 던졌을 때 초반에는 공과 손의 거리가 가까워서 던져지지 않고 붙여지는 경우가 발생했는데 이 부분을 던졌다는 표시를 주어서 조절했습니다.
결과 동영상 :
이때 구현할 때 신경 쓴 점은

으로 y값과 delet 지연 속도의 조절을 통해 구현하였습니다. 그 후에 2개의 공 상호작용에 대해서 추가 구현하였으며 어느 정도 저글링을 구현하였다고 판단하고 다음 단계로 넘어갔습니다. 다음에 할 부분은 근육 표시로 사용자가 저글링을 하는 동안 각 근육의 이용률(?) 또는 사용률(?)을 어느 정도 측정하여 표시해주는 것입니다.
1. 팔 근육 표시하기
2. 각 근육의 이용률(?) 또는 사용률(?)
결과적으로 구현하고자 하는 것 : 사용자가 XR 운동적 상호작용 속에서 현실의 운동 코치처럼 사용자에게 운동 정보를 제공하는 것입니다.
'Project' 카테고리의 다른 글
| [유니티] 특정 키를 눌렸을 때 다시 시작, 다시 씬 로드 (0) | 2020.05.05 |
|---|---|
| [Leap motion] Leap Service 이(가) 작동하지 않습니다 - 수동 실행하 (1) | 2020.04.26 |
| [unity + leap motion project] 립모션 제스처 만들기 프로젝트 4번째 정리 (0) | 2020.03.25 |
| [unity + leap motion project] 립모션 제스처 만들기 프로젝트 3번째 정리 (1) | 2020.03.23 |
| [unity + leap motion project] 립모션 제스처 만들기 프로젝트 2번째 정리 (9) | 2020.03.17 |




댓글